
Directed hypergraphs [7,8,10] serve as a powerful modelling tool in both Operations Research and Computer Science, offering a broader representation than traditional directed graphs. They allow for the representation of relationships among multiple entities, making them particularly useful in scenarios where complex interactions need to be captured.
The concept of soft sets, pioneered by Molodtsov [27] in 1999, revolutionized mathematical approaches to dealing with uncertainties that evade conventional methods. Soft sets provide a flexible framework for handling imprecise or uncertain information, enabling more robust decision-making processes. Subsequent research by Maji, Roy, and Biswas [25,26] has delved deeper into the theory of soft sets, exploring their applications in various decision-making contexts.
Thumbakara and George [31] introduced soft graphs and some of their properties [33,34], which have since been refined and extended by researchers like Akram and Nawas [2,3]. Their work has led to the development of fuzzy soft graphs and fuzzy soft trees, further expanding the applicability of soft graph theory [4,5,6]. Contributions from Thenge, Jain, and Reddy [30,28,29] have also significantly advanced the field of soft graphs.
George, Thumbakara, and Jose have made substantial contributions to the domain by introducing concepts such as soft hypergraphs [11] and soft directed graphs [23,22]. These extensions have broadened the scope of soft graph theory, enabling the modelling of more complex systems and phenomena. Moreover, they have investigated various product operations on soft graphs, including modular products and homomorphic products, which have implications for graph analysis and manipulation [12,14,15,19,21,20,24].
Baghernejad and Borzooei [9] have demonstrated the practical utility of soft graphs and soft multigraphs in managing urban traffic flows, showcasing the real-world applicability of these theoretical constructs. Additionally, innovations like soft semigraphs [13,18,17] and soft disemigraphs [16] have further enriched the field, providing new avenues for exploration and application.
In this paper, the authors introduce the concept of soft directed hypergraphs, which represent a further extension of soft graph theory. They also investigate various operations on soft directed hypergraphs, aiming to elucidate their properties.
For basic concepts of a directed hypergraph, we refer [1,4,8]. “A directed hypergraph \(\Delta^*=(\Gamma, \Xi)\) consists of a vertex set \(\Gamma\) and a set of directed hyperedges or hyperarcs \(\Xi=\{e=(T(e),H(e)) | T(e)\subseteq \Gamma\) and \(H(e)\subseteq \Gamma\}\), where \(T(e)\neq \phi\) and \(H(e)\neq \phi\). The sets \(T(e)\) and \(H(e)\) are called tail and head of the hyperarc \(e\), respectively. A directed hypergraph is called k-uniform if \(|T(e)| = |H(e)| = k\) for all \(e\in \Xi\). Two hyperarcs \(e\) and \(e’\) are said to be parallel if \(T(e)=T(e’)\) and \(H(e)=H(e’)\). A hyperarc \(e\) is said to be a loop if \(T(e)=H(e)\). A directed hypergraph \(\Delta^* = (\Gamma, \Xi)\) is called simple if it has no parallel hyperarcs and loops. A directed hypergraph is called trivial if \(|\Gamma| = 1\) and \(\Xi=\phi\). If the two vertices \(u\) and \(v\) of \(\Delta^*\) are such that \(u\in T(e)\) and \(v\in H(e)\) then we say that \(v\) is adjacent from \(u\) or \(u\) is adjacent to \(v\). The indegree of a vertex \(v\) in \(\Delta^*\), denoted by \(d^-(v)\) is the number of hyperarcs that contain \(v\) in their head. The outdegree of a vertex \(v\) in \(\Delta^*\), denoted by \(d^+(v)\) is the number of hyperarcs that contain \(v\) in their tail. A directed hypergraph \(\Delta’=(\Gamma’,\Xi’)\) is a weak subhypergraph of the directed hypergraph \(\Delta^*=(\Gamma, \Xi)\) if \(\Gamma’\subseteq \Gamma\) and \(\Xi’\) consists of hyperarcs \(e’\) with \(T(e’)=\{v|v\in T(e)\cap \Gamma’\}\) and \(H(e’)=\{v|v\in H(e)\cap \Gamma’\}\) for some \(e\in \Xi\). A directed hypergraph \(\Delta’=(\Gamma’,\Xi’)\) is a weak induced subhypergraph of the directed hypergraph \(\Delta^*=(\Gamma, \Xi)\) if \(\Gamma’\subseteq \Gamma\) and hyperarc set \(\Xi’=\{(T(e)\cap \Gamma’,H(e)\cap \Gamma’)|e\in \Xi\)and\(T(e)\cap \Gamma’\neq \phi\)and\(H(e)\cap \Gamma’\neq \phi\}\).”
In 1999 Molodtsov [27] initiated the concept of soft sets. Let \(U\) be an initial universe set and let \(\Pi\) be a set of parameters. A pair \((F, \Pi)\) is called a soft set (over \(U\)) if and only \(F\) is a mapping of \(\Pi\) into the set of all subsets of the set \(U\). That is, \(F : \Pi \rightarrow \mathcal{P}(U)\).
\(\Delta^*=(\Gamma, \Xi)\) is a simple directed hypergraph having vertex set \(\Gamma\) and hyperarc set \(\Xi\),
\(\Pi\) is a nonempty set of parameters,
\((\Omega, \Pi)\) is a soft set over \(\Gamma\),
\((\Psi, \Pi)\) is a soft set over \(\Xi_s\),
(e)\((\Omega(\pi),\Psi(\pi))\) is a weak induced subhypergraph of \(\Delta^*\) for all \(\pi \in \Pi\).
If we represent \((\Omega(\pi),\Psi(\pi))\) by \(Z(\pi)\), then the soft directed hypergraph \(\Delta\) is also given by \(\{Z(\pi): \pi \in \Pi\}\). Then \(Z(\pi)\) corresponding to a parameter \(\pi\) in \(\Pi\) is called a directed hyperpart or simply dh-part of the soft directed hypergraph \(\Delta\).
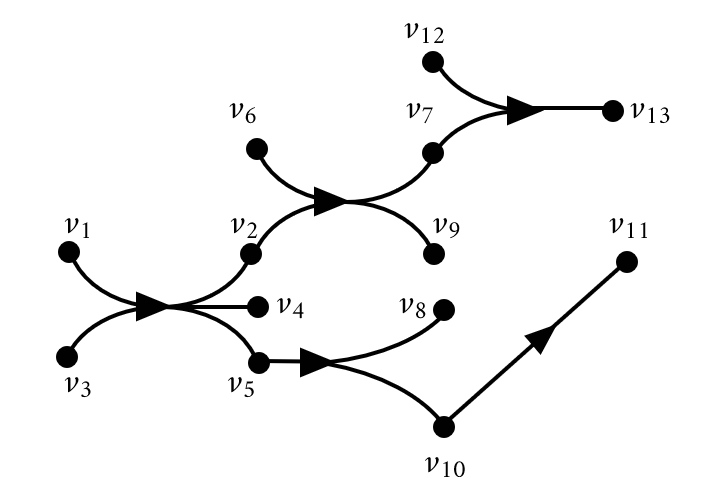
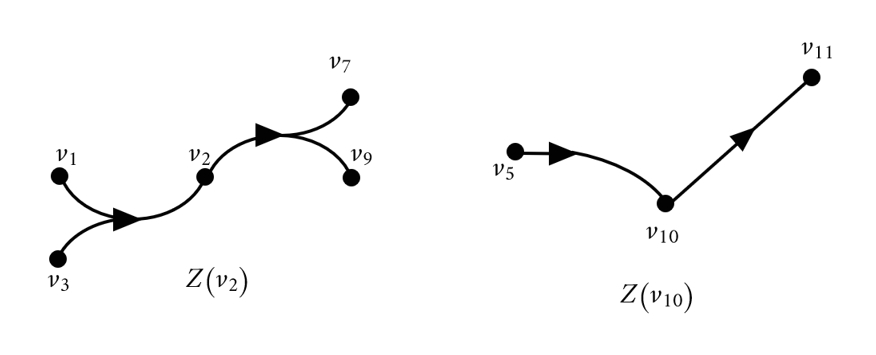
Let \(\Pi = \{v_2, v_{10}\}\subseteq \Gamma\) be a parameter set. Define a function \(X: \Pi\rightarrow \mathcal{P}(\Gamma)\) defined by \(\Omega(\pi)=\{v\in \Gamma : \pi Rv \Leftrightarrow v = \pi\) or \(v\) is adjacent from \(\pi\) or \(v\) is adjacent to \(\pi\)} for all \(\pi \in P\). That is, \(\Omega(v_2) = \{v_1, v_2, v_3, v_7, v_9\}\) and \(\Omega(v_{10}) = \{v_5, v_{10}, v_{11}\}\). Then \((\Omega, \Pi)\) is a soft set over \(\Gamma\). Define another function \(\Psi: \Pi \rightarrow \mathcal{P} (\Xi_s)\) defined by \(\Psi(\pi)=\{(T(e)\cap \Omega(\pi),H(e)\cap \Omega(\pi))|e\in \Xi\)and\(T(e)\cap \Omega(\pi)\neq \phi\)and\(H(e)\cap \Omega(\pi)\neq \phi\}\). That is, \(\Psi(v_2) = \{(\{v_1, v_3\}, \{v_2\}),(\{v_2\}, \{v_7, v_9\}) \}\) and \(v_{10}) = \{(\{v_5\},\{v_{10}\}), (\{v_{10}\},\{ v_{11}\} )\}\). Then \((\Psi, \Pi)\) is a soft set over \(\Xi_s\). Also \(Z (v_2) = (\Omega(v_2), \Psi(v_2))\) and \(Z(v_{10}) = (\Omega(v_{10}), \Psi(v_{10}))\) are weak induced subhypergraphs of \(\Delta^*\) as shown in Figure 2. Hence \(\Delta= \{Z (v_2), Z (v_{10})\}\) is a soft directed hypergraph of \(\Delta^*\).
\(\Pi_2 \subseteq \Pi_1\),
\(Z_2(\pi) = (\Omega_2(\pi),\Psi_2(\pi))\) is a weak induced subhypergraph of \(Z_1(\pi) = (\Omega_1(\pi),\Psi_1(\pi))\) for all \(\pi \in \Pi_2\).
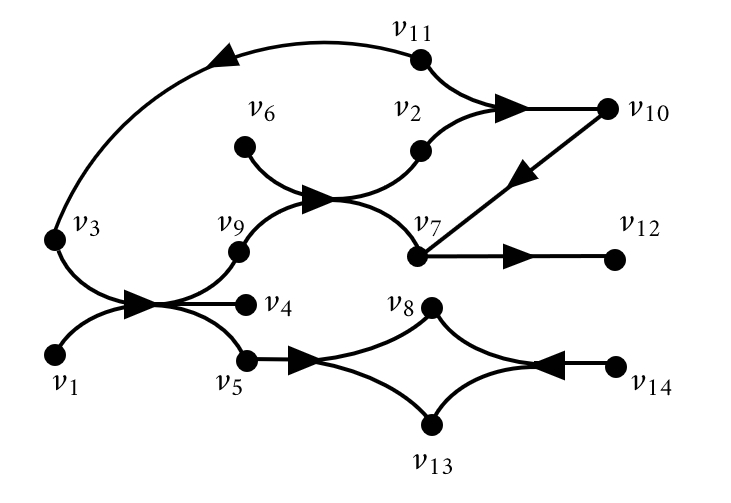
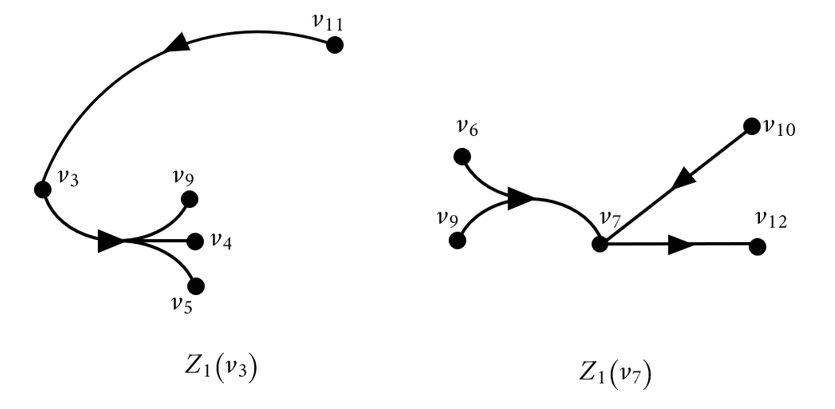
Let \(\Pi_1 = \{v_3, v_7\}\subseteq \Gamma\) be a parameter set. Define a function \(\Omega_1: \Pi_1\rightarrow \mathcal{P}(\Gamma)\) defined by \(\Omega_1(\pi)=\{v\in \Gamma : \pi Rv \Leftrightarrow v = \pi\) or \(v\) is adjacent from \(\pi\) or \(v\) is adjacent to \(\pi\)} for all \(\pi \in \Pi_1\). That is, \(\Omega_1 (v_3) = \{v_3, v_4, v_5, v_9, v_{11}\}\) and \(\Omega_1 (v_7) = \{v_6, v_7, v_9, v_{10}, v_{12}\}\).
Then \((\Omega_1, \Pi_1)\) is a soft set over \(\Gamma\). Define another function \(\Psi_1: \Pi_1 \rightarrow \mathcal{P} (\Xi_s)\) defined by \(\Psi_1(\pi)=\{(T(e)\cap \Omega_1(\pi),H(e)\cap \Omega_1(\pi))|e\in \Xi\)and\(T(e)\cap \Omega_1(\pi)\neq \phi\)and\(H(e)\cap \Omega_1(\pi)\neq \phi\}\). That is, \(\Psi_1 (v_3) = \{(\{v_{11}\}, \{v_3\}),(\{v_3\}, \{v_4, v_5, v_9\}) \}\) and \(\Psi_1 (v_7) = \{(\{v_6, v_9\},\{v_7\}), (\{v_{10}\},\{ v_7\} ), (\{v_7\},\{ v_{12}\} )\}\). Then \((\Psi_1, \Pi_1)\) is a soft set over \(\Xi_s\). Also \(Z_1 (v_3) = (\Omega_1 (v_3), \Psi_1 (v_3))\) and \(Z_1(v_7) = (\Omega_1 (v_7), \Psi_1 (v_7))\) are weak induced subhypergraphs of \(\Delta^*\) as shown in Figure 4. Hence \(\Delta_1= \{Z_1 (v_3), Z_1 (v_7)\}\) is a soft directed hypergraph of \(\Delta^*\).
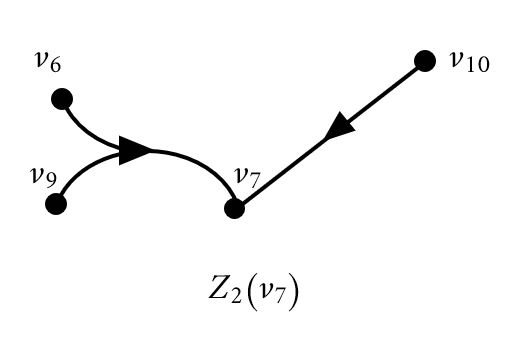
Let \(\Pi_2 = \{v_7\}\subseteq \Gamma\) be another parameter set. Define a function \(\Omega_2: \Pi_2\rightarrow \mathcal{P}(\Gamma)\) defined by \(\Omega_2(\pi)=\{v\in \Gamma : \pi Rv \Leftrightarrow v = \pi\) or \(v\) is adjacent to \(\pi\)} for all \(\pi \in \Pi_2\). That is, \(\Omega_2 (v_7) = \{v_6, v_7, v_9, v_{10}\}\). Then \((\Omega_2, \Pi_2)\) is a soft set over \(\Gamma\). Define another function \(\Psi_2: \Pi_2 \rightarrow \mathcal{P} (\Xi_s)\) defined by \(\Psi_2(\pi)=\{(T(e)\cap \Omega_2(\pi),H(e)\cap \Omega_2(\pi))|e\in \Xi\)and\(T(e)\cap \Omega_2(\pi)\neq \phi\)and\(H(e)\cap \Omega_2(\pi)\neq \phi\}\). That is, \(\Psi_2 (v_7) = \{(\{v_6, v_9\},\{v_7\}), (\{v_{10}\},\{ v_7\} )\}\). Then \((\Psi_2, \Pi_2)\) is a soft set over \(\Xi_s\). Also \(Z_2(v_7) = (\Omega_2 (v_7), \Psi_2 (v_7))\) is a weak induced subhypergraph of \(\Delta^*\) as shown in Figure 5. Hence \(\Delta_2= \{Z_2 (v_7)\}\) is a soft directed hypergraph of \(\Delta^*\).
Here \(\Delta_2\) is a soft weak induced subhypergraph of \(\Delta_1\) since
\(\Pi_2 \subseteq \Pi_1\),
\(Z_2(v_7) = (\Omega_2(v_7),\Psi_2(v_7))\) is a weak induced subhypergraph of \(Z_1(v_7) = (\Omega_1(v_7),\Psi_1(v_7))\).
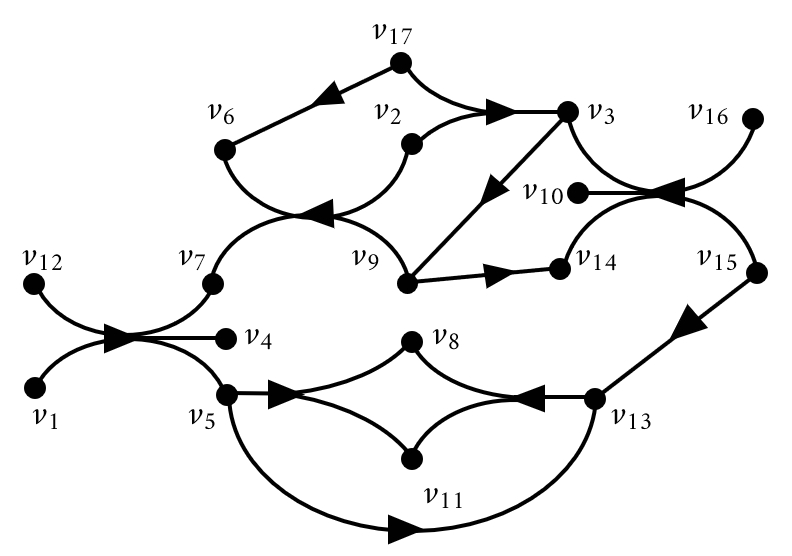
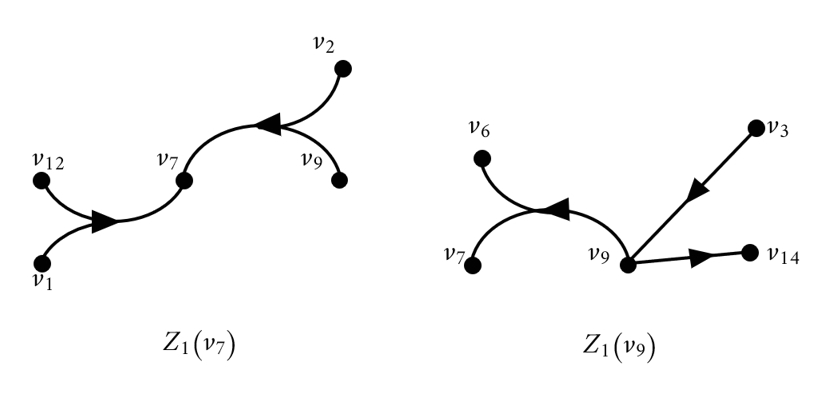
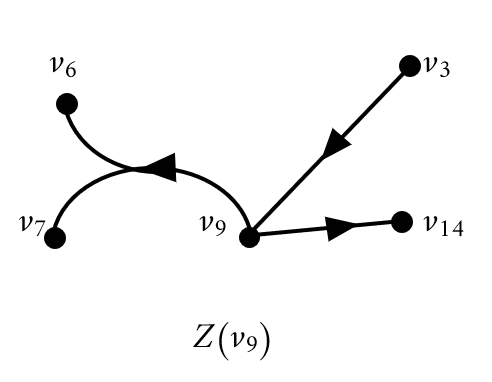
Let \(\Pi_1 = \{v_7, v_9\}\subseteq \Gamma\) be a parameter set. Define a function \(\Omega_1: \Pi_1\rightarrow \mathcal{P}(\Gamma)\) defined by \(\Omega_1(\pi)=\{v\in \Gamma : \pi Rv \Leftrightarrow v = \pi\) or \(v\) is adjacent from \(\pi\) or \(v\) is adjacent to \(\pi\)}, for all \(\pi \in \Pi_1\). That is, \(\Omega_1 (v_7) = \{v_1, v_2, v_7, v_9, v_{12}\}\) and \(\Omega_1 (v_9) = \{v_3, v_6, v_7, v_9, v_{14}\}\). Then \((\Omega_1, \Pi_1)\) is a soft set over \(\Gamma\). Define another function \(\Psi_1: \Pi_1 \rightarrow \mathcal{P} (\Xi_s)\) defined by \(\Psi_1(\pi)=\{(T(e)\cap \Omega_1(\pi),H(e)\cap \Omega_1(\pi))|e\in \Xi\)and\(T(e)\cap \Omega_1(\pi)\neq \phi\)and\(H(e)\cap \Omega_1(\pi)\neq \phi\}\). That is, \(\Psi_1 (v_7) = \{(\{v_1, v_{12}\}, \{v_7\}),(\{v_2, v_9\}, \{v_7\}) \}\) and \(\Psi_1 (v_9) = \{(\{v_9\}, \{v_6, v_7\}), (\{v_3\},\{ v_9\} ), (\{v_9\},\{ v_{14}\} )\}\). Then \((\Psi_1, \Pi_1)\) is a soft set over \(\Xi_s\). Also \(Z_1 (v_7) = (\Omega_1 (v_7), \Psi_1 (v_7))\) and \(Z_1(v_9) = (\Omega_1 (v_9), \Psi_1 (v_9))\) are weak induced subhypergraphs of \(\Delta^*\) as shown in Figure 7.
Hence \(\Delta_1= \{Z_1 (v_7), Z_1 (v_9)\}\) is a soft directed hypergraph of \(\Delta^*\).
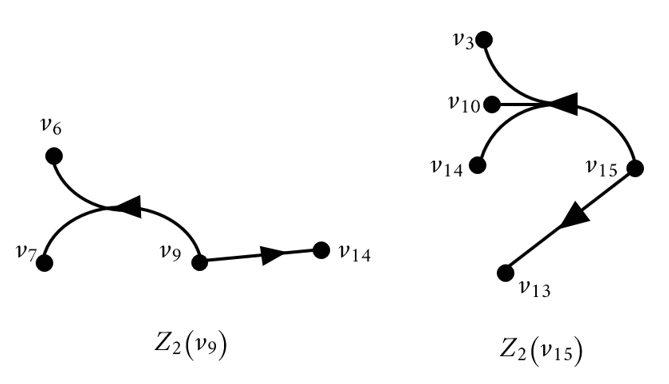
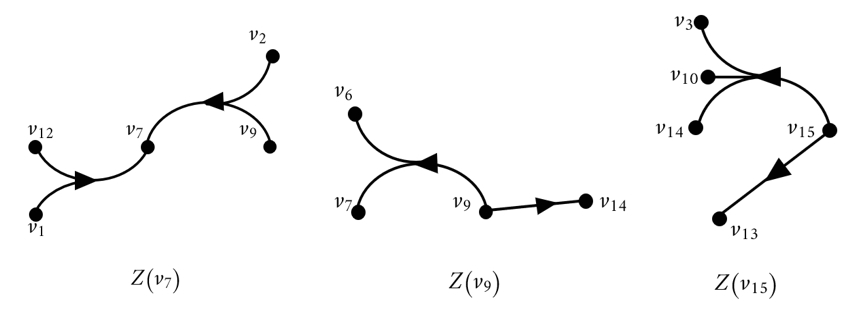
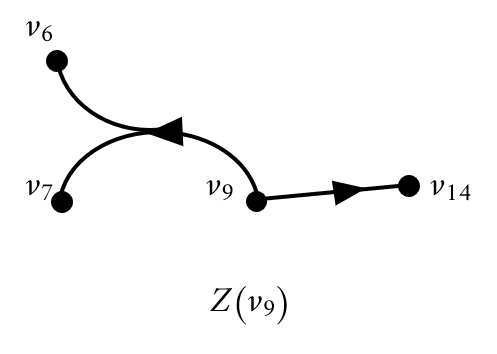
Let \(\Pi_2 = \{v_9, v_{15}\}\subseteq \Gamma\) be another parameter set. Define a function \(\Omega_2: \Pi_2\rightarrow \mathcal{P}(\Gamma)\) defined by \(\Omega_2(\pi)=\{v\in \Gamma : \pi Rv \Leftrightarrow v = \pi\) or \(v\) is adjacent from \(\pi\)}, for all \(\pi \in \Pi_2\). That is, \(\Omega_2 (v_9) = \{v_6, v_7, v_9, v_{14}\}\) and \(\Omega_2 (v_{15}) = \{v_3, v_{10}, v_{13}, v_{14}, v_{15}\}\). Then \((\Omega_2, \Pi_2)\) is a soft set over \(\Gamma\). Define another function \(\Psi_2: \Pi_2 \rightarrow \mathcal{P} (\Xi_s)\) defined by \(\Psi_2(\pi)=\{(T(e)\cap \Omega_2(\pi),H(e)\cap \Omega_2(\pi))|e\in \Xi\)and\(T(e)\cap \Omega_2(\pi)\neq \phi\)and\(H(e)\cap \Omega_2(\pi)\neq \phi\}\). That is, \(\Psi_2 (v_9) = \{(\{v_9\},\{v_6, v_7\}), (\{v_9\},\{ v_{14}\} )\}\) and \(\Psi_2 (v_{15}) = \{(\{v_{15}\},\{v_3, v_{10}, v_{14}\}), (\{v_{15}\},\{ v_{13}\} )\}\). Then \((\Psi_2, \Pi_2)\) is a soft set over \(\Xi_s\). Also \(Z_2(v_9) = (\Omega_2 (v_9), \Psi_2 (v_9))\) and \(Z_2(v_{15}) = (\Omega_2 (v_{15}), \Psi_2 (v_{15}))\) are weak induced subhypergraphs of \(\Delta^*\) as shown in Figure 8.
Hence \(\Delta_2= \{Z_2 (v_9), Z_2 (v_{15})\}\) is a soft directed hypergraph of \(\Delta^*\).
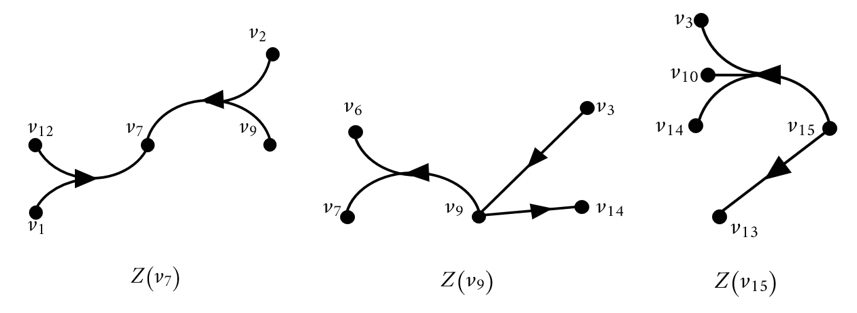
The extended union of two soft directed hypergraphs \(\Delta_1\) and \(\Delta_2\) is \(\Delta = \Delta_1\cup_E \Delta_2 = (\Delta^*,\Omega, \Psi, \Pi)\) where \(\Pi = \Pi_1\cup \Pi_2 = \{v_7, v_9, v_{15}\}\). Also \(\Omega(v_7) = \Omega_1(v_7) = \{v_1, v_2, v_7, v_9, v_{12}\}\), \(\Psi(v_7) = \Psi_1 (v_7) = \{(\{v_1, v_{12}\}, \{v_7\}),(\{v_2, v_9\}, \{v_7\}) \}\), \(\Omega(v_9) = \Omega_1(v_9)\cup \Omega_2(v_9) =\Omega_1 (v_9) = \{v_3, v_6, v_7, v_9, v_{14}\}\), \(\Psi(v_9) = \{(T(e)\cap \Omega(v_9),H(e)\cap \Omega(v_9))|e\in \Xi\)and\(T(e)\cap \Omega(v_9)\neq \phi\)and\(H(e)\cap \Omega(v_9)\neq \phi\} = \{(\{v_9\}, \{v_6, v_7\}),\\ (\{v_3\},\{ v_9\} ), (\{v_9\},\{ v_{14}\} )\}\), \(\Omega(v_{15}) = \Omega_2(v_{15}) = \{v_3, v_{10}, v_{13},v_{14}, v_{15}\}\) and \(\Psi(v_{15}) = \Psi_2 (v_{15}) = \{(\{v_{15}\},\\ \{v_3, v_{10}, v_{14}\}), (\{v_{15}\},\{ v_{13}\} )\}\). Here \((\Omega, \Pi)\) is a soft set over \(\Gamma\) and \((\Psi, \Pi)\) is a soft set over \(\Xi_s\). Also \(Z(v_7)=(\Omega(v_7),\Psi(v_7)), Z(v_9)=(\Omega(v_9),\Psi(v_9))\) and \(Z(v_{15})=(\Omega(v_{15}),\Psi(v_{15}))\) are weak induced subhypergraphs of \(\Delta^*\). Hence \(\Delta_1\cup_E \Delta_2 = \{Z(v_7), Z(v_9), Z(v_{15})\}\) is a soft directed hypergrah of \(\Delta^*\) and is given in Figure 9.
Proof. The extended union of \(\Delta_1\) and \(\Delta_2\) is given by \(\Delta_1\cup_E \Delta_2 = \Delta = (\Delta^*,\Omega, \Psi, \Pi)\), where \(\Pi = \Pi_1\cup \Pi_2\) and for all \(\pi \in \Pi\),<\[ \Omega(\pi) = \begin{cases} \Omega_1(\pi), & \text{if} \pi \in \Pi_1-\Pi_2,\\ \Omega_2(\pi), & \text{if} \pi \in \Pi_2-\Pi_1,\\ \Omega_1(\pi)\cup \Omega_2(\pi), & \text{if} \pi \in \Pi_1\cap \Pi_2.\\ \end{cases} \] and \[ \Psi(\pi) = \begin{cases} \Psi_1(\pi), & \text{if} \pi \in \Pi_1-\Pi_2,\\ \Psi_2(\pi), & \text{if} \pi \in \Pi_2-\Pi_1,\\ \{(T(e)\cap \Omega(\pi),H(e)\cap \Omega(\pi))|e\in \Xi \text{and} T(e)\cap \Omega(\pi)\neq \phi \text{and}\\ H(e)\cap \Omega(\pi)\neq \phi\}, & \text{if} \pi \in \Pi_1\cap \Pi_2.\\ \end{cases}. \]
That is, in \(\Delta_1\cup_E \Delta_2\), \(\Pi = \Pi_1 \cup \Pi_2\) is a parameter set, \(\Omega\) is a mapping from \(\Pi\) to \(\mathcal{P}(\Gamma)\) and \(\Psi\) is a mapping from \(\Pi\) to \(\mathcal{P}(\Xi_s)\). Here \((\Omega, \Pi)\) is a soft set over \(\Gamma\) and \((\Psi, \Pi)\) is a soft set over \(\Xi_s\). When \(\pi \in \Pi_1-\Pi_2\), the corresponding dh-part \(Z(\pi)\) of \(\Delta_1\cup_E \Delta_2\) is \(Z(\pi) = (\Omega_1(\pi), \Psi_1(\pi))\). This is a weak induced subhypergraph of \(\Delta^*\) since \(\Delta_1\) is a soft directed hypergraph of \(\Delta^*\). When \(\pi \in \Pi_2-\Pi_1\), the corresponding dh-part of \(\Delta_1\cup_E \Delta_2\) is \(Z(\pi) = (\Omega_2(\pi), \Psi_2(\pi))\). This is a weak induced subhypergraph of \(\Delta^*\) since \(\Delta_2\) is a soft directed hypergraph of \(\Delta^*\). When \(\pi \in \Pi_1\cap \Pi_2\) , the corresponding dh-part of \(\Delta_1\cup_E \Delta_2\) is \(Z(\pi) = (\Omega(\pi), \Psi(\pi))\) where \(\Omega(\pi) = \Omega_1(\pi)\cup \Omega_2(\pi)\) and \(\Psi(\pi) = \{(T(e)\cap \Omega(\pi),H(e)\cap \Omega(\pi))|e\in \Xi\)and\(T(e)\cap \Omega(\pi)\neq \phi\)and\(H(e)\cap \Omega(\pi)\neq \phi\}\). We have \(\Omega_1(\pi)\cup \Omega_2(\pi)\subseteq \Gamma\) and each hyperarc in \(\Psi(\pi)\) is a subhyperarc of \(\Delta^*\) for all \(\pi \in \Pi_1\cap \Pi_2\). So \(Z(\pi)\) is a weak induced subhypergraph of \(\Delta^*\) for all \(\pi \in \Pi_1\cap \Pi_2\). That is, \(Z(\pi) = (\Omega(\pi), \Psi(\pi))\) is a weak induced subhypergraph of \(\Delta^*\) for all \(\pi \in \Pi = \Pi_1\cup \Pi_2\). That is, \(\Delta_1\cup_E \Delta_2 = (\Delta^*, \Omega, \Psi, \Pi)\) is a soft directed hypergraph of \(\Delta^*\) since the following conditions are satisfied:
\(\Delta^*=(\Gamma, \Xi)\) is a simple directed hypergraph,
\(\Pi=\Pi_1\cup \Pi_2\) is a nonempty set of parameters,
\((\Omega, \Pi)\) is a soft set over \(\Gamma\),
\((\Psi, \Pi)\) is a soft set over \(\Xi_s\),
\((\Omega(\pi),\Psi(\pi))\) is a weak induced subhypergraph of \(\Delta^*\) for all \(\pi \in \Pi=\Pi_1\cup \Pi_2\).
◻
Proof. The extended intersection of \(\Delta_1\) and \(\Delta_2\) is given by \(\Delta_1\cap_E \Delta_2 = \Delta = (\Delta^*,\Omega, \Psi, \Pi)\), where \(\Pi = \Pi_1\cup \Pi_2\) and for all \(\pi \in \Pi\),
\[ \Omega(\pi) = \begin{cases} \Omega_1(\pi),& \text{if} \pi \in \Pi_1-\Pi_2,\\ \Omega_2(\pi), & \text{if} \pi \in \Pi_2-\Pi_1,\\ \Omega_1(\pi)\cap \Omega_2(\pi), & \text{if} \pi \in \Pi_1\cap \Pi_2.\\ \end{cases} \] and \[ \Psi(\pi) = \begin{cases} \Psi_1(\pi), & \text{if} \pi \in \Pi_1-\Pi_2,\\ \Psi_2(\pi), & \text{if} \pi \in \Pi_2-\Pi_1,\\ \{(T(e)\cap \Omega(\pi),H(e)\cap \Omega(\pi))|e\in \Xi $and$ T(e)\cap \Omega(\pi)\neq \phi \text{and}&\\ H(e)\cap \Omega(\pi)\neq \phi\}, & \text{if} \pi \in \Pi_1\cap \Pi_2.\\ \end{cases}. \]That is, in \(\Delta_1\cap_E \Delta_2\), \(\Pi = \Pi_1 \cup \Pi_2\) is a parameter set, \(\Omega\) is a mapping from \(\Pi\) to \(\mathcal{P}(\Gamma)\) and \(\Psi\) is a mapping from \(\Pi\) to \(\mathcal{P}(\Xi_s)\). Here \((\Omega, \Pi)\) is a soft set over \(\Gamma\) and \((\Psi, \Pi)\) is a soft set over \(\Xi_s\). When \(\pi \in \Pi_1-\Pi_2\), the corresponding dh-part \(Z(\pi)\) of \(\Delta_1\cap_E \Delta_2\) is \(Z(\pi) = (\Omega_1(\pi), \Psi_1(\pi))\). This is a weak induced subhypergraph of \(\Delta^*\) since \(\Delta_1\) is a soft directed hypergraph of \(\Delta^*\). When \(\pi \in \Pi_2-\Pi_1\), the corresponding dh-part of \(\Delta_1\cap_E \Delta_2\) is \(Z(\pi) = (\Omega_2(\pi), \Psi_2(\pi))\). This is a weak induced subhypergraph of \(\Delta^*\) since \(\Delta_2\) is a soft directed hypergraph of \(\Delta^*\). When \(\pi \in \Pi_1\cap \Pi_2\) , the corresponding dh-part of \(\Delta_1\cap_E \Delta_2\) is \(Z(\pi) = (\Omega(\pi), \Psi(\pi))\) where \(\Omega(\pi) = \Omega_1(\pi)\cap \Omega_2(\pi)\) and \(\Psi(\pi) = \{(T(e)\cap \Omega(\pi),H(e)\cap \Omega(\pi))|e\in \Xi\)and\(T(e)\cap \Omega(\pi)\neq \phi\)and\(H(e)\cap \Omega(\pi)\neq \phi\}\). We have \(\Omega_1(\pi)\cap \Omega_2(\pi)\subseteq \Gamma\) and each hyperarc in \(\Psi(\pi)\) is a subhyperarc of \(\Delta^*\) for all \(\pi \in \Pi_1\cap \Pi_2\). So \(Z(\pi)\) is a weak induced subhypergraph of \(\Delta^*\) for all \(\pi \in \Pi_1\cap \Pi_2\). That is, \(Z(\pi) = (\Omega(\pi), \Psi(\pi))\) is a weak induced subhypergraph of \(\Delta^*\), for all \(\pi \in \Pi = \Pi_1\cup \Pi_2\). That is, \(\Delta_1\cap_E \Delta_2 = (\Delta^*, \Omega, \Psi, \Pi)\) is a soft directed hypergraph of \(\Delta^*\) since the following conditions are satisfied:
\(\Delta^*=(\Gamma, \Xi)\) is a simple directed hypergraph,
\(\Pi=\Pi_1\cup \Pi_2\) is a nonempty set of parameters,
\((\Omega, \Pi)\) is a soft set over \(\Gamma\),
\((\Psi, \Pi)\) is a soft set over \(\Xi_s\),
\((\Omega(\pi),\Psi(\pi))\) is a weak induced subhypergraph of \(\Delta^*\) for all \(\pi \in \Pi\).
◻
Proof. By Theorems 4.3 and 5.3, we have \(\Delta_1\cup_E \Delta_2\) and \(\Delta_1\cap_E \Delta_2\) are soft directed hypergraphs of \(\Delta^*\). Assume that \(\Delta_1\cup_E \Delta_2 = \Delta_{EU} = (\Delta^*, \Omega_{EU}, \Psi_{EU}, \Pi_{EU})\) and \(\Delta_1\cap_E \Delta_2 = \Delta_{EI} = (\Delta^*, \Omega_{EI}, \Psi_{EI}, \Pi_{EI})\). By the definitions of extended union and the extended intersection of two soft directed hypergraphs, \(\Pi_{EU} = \Pi_{EI} = \Pi_1\cup \Pi_2\). Therefore we have \(\Pi_{EI}\subseteq \Pi_{EU}\).
We divide the parameter set \(\Pi_{EI} = \Pi_1\cup \Pi_2\) into three parts: (i) \(\Pi_1 – \Pi_2\) (ii) \(\Pi_2 – \Pi_1\) (iii) \(\Pi_1 \cap \Pi_2\). We consider the three cases one by one.
If \(\pi \in \Pi_1 – \Pi_2\), the corresponding dh-parts \(Z_{EI}(\pi) = (\Omega_{EI}(\pi), \Psi_{EI}(\pi))\) and \(Z_{EU}(\pi) = (\Omega_{EU}(\pi), \Psi_{EU}(\pi))\) of \(\Delta_{EI}\) and \(\Delta_{EU}\) respectively are equal to \(Z_1(\pi) = (\Omega_1(\pi), \Psi_1(\pi))\). That is, \(Z_{EI}(\pi)\) is a weak induced subhypergraph of \(Z_{EU}(\pi) , \forall \pi \in \Pi_1 – \Pi_2\), since both dh-parts are identical.
If \(\pi \in \Pi_2 – \Pi_1\), the corresponding dh-parts \(Z_{EI}(\pi) = (\Omega_{EI}(\pi), \Psi_{EI}(\pi))\) and \(Z_{EU}(\pi) = (\Omega_{EU}(\pi), \Psi_{EU}(\pi))\) of \(\Delta_{EI}\) and \(\Delta_{EU}\) respectively are equal to \(Z_2(\pi) = (\Omega_2(\pi), \Psi_2(\pi))\). That is, \(Z_{EI}(\pi)\) is a weak induced subhypergraph of \(Z_{EU}(\pi) , \forall \pi \in \Pi_2 – \Pi_1\), since both dh-parts are identical.
If \(\pi \in \Pi_1 \cap \Pi_2\), \(Z_{EI}(\pi) = (\Omega_{EI}(\pi), \Psi_{EI}(\pi))\), where \(\Omega_{EI}(\pi) = \Omega_1(\pi) \cap \Omega_2(\pi)\) and \(\Psi_{EI}(\pi) = \{(T(e)\cap \Omega_{EI}(\pi),H(e)\cap \Omega_{EI}(\pi))|e\in \Xi\)and\(T(e)\cap \Omega_{EI}(\pi)\neq \phi\)and\(H(e)\cap \Omega_{EI}(\pi)\neq \phi\}\) and \(Z_{EU}(\pi) = (\Omega_{EU}(\pi), \Psi_{EU}(\pi))\), where \(\Omega_{EU}(\pi) = \Omega_1(\pi) \cup \Omega_2(\pi)\) and \(\Psi_{EU}(\pi) = \{(T(e)\cap \Omega_{EU}(\pi),H(e)\cap \Omega_{EU}(\pi))|e\in \Xi\)and\(T(e)\cap \Omega_{EU}(\pi)\neq \phi\)and\(H(e)\cap \Omega_{EU}(\pi)\neq \phi\}\). Clearly \(\Omega_{EI}(\pi) \subseteq \Omega_{EU}(\pi)\) and each hyperarc present in \(\Psi_{EI}(\pi)\) is a subhyperarc of a hyperarc present in \(\Psi_{EU}(\pi)\). So \(Z_{EI}(\pi)\) is a weak induced subhypergraph of \(Z_{EU}(\pi) , \forall \pi \in \Pi_2 \cap \Pi_1\).
That is, we have
\(\Pi_{EI} \subseteq \Pi_{EU}\),
For all \(\pi \in \Pi_{EI}\), \(Z_{EI}(\pi)=(\Omega_{EI}(\pi),\Psi_{EI}(\pi))\) is a weak induced subhypergraph of \(Z_{EU}(\pi)=(\Omega_{EU}(\pi),\Psi_{EU}(\pi))\).
Hence \(\Delta_1\cap_E \Delta_2\) is a soft weak induced subhypergraph of \(\Delta_1\cup_E \Delta_2\). ◻
Proof. The restricted union \(\Delta_1\cup_R \Delta_2\) is defined as \(\Delta_1\cup_R \Delta_2 = \Delta = (\Delta^*,\Omega, \Psi, \Pi)\), where \(\Pi = \Pi_1\cap \Pi_2 \neq \phi\) is the parameter set and for all \(\pi \in \Pi\), \(\Omega(\pi) = \Omega_1(\pi)\cup \Omega_2(\pi)\) and \(\Psi(\pi) = \{(T(e)\cap \Omega(\pi),H(e)\cap \Omega(\pi))|e\in \Xi\)and\(T(e)\cap \Omega(\pi)\neq \phi\)and\(H(e)\cap \Omega(\pi)\neq \phi\}\). Here \(\Omega\) is a mapping from \(\Pi\) to \(\mathcal{P}(\Gamma)\) and \(\Psi\) is a mapping from \(\Pi\) to \(\mathcal{P}(\Xi_s)\). Also \((\Omega, \Pi)\) is a soft set over \(\Gamma\) and \((\Psi, \Pi)\) is a soft set over \(\Xi_s\). When \(\pi \in \Pi = \Pi_1\cap \Pi_2\) , the corresponding dh-part of \(\Delta_1\cup_R \Delta_2\) is \(Z(\pi) = (\Omega(\pi), \Psi(\pi))\) where \(\Omega(\pi) = \Omega_1(\pi)\cup \Omega_2(\pi)\) and \(\Psi(\pi) = \{(T(e)\cap \Omega(\pi),H(e)\cap \Omega(\pi))|e\in \Xi\)and\(T(e)\cap \Omega(\pi)\neq \phi\)and\(H(e)\cap \Omega(\pi)\neq \phi\}\). We have \(\Omega_1(\pi)\cup \Omega_2(\pi)\subseteq \Gamma\) and each hyperarc in \(\Psi(\pi)\) is a subhyperarc of \(\Delta^*\) for all \(\pi \in \Pi = \Pi_1\cap \Pi_2\). So \(Z(\pi) = (\Omega(\pi), \Psi(\pi))\) is a weak induced subhypergraph of \(\Delta^*\) for all \(\pi \in \Pi = \Pi_1\cup \Pi_2\). That is, \(\Delta_1\cup_R \Delta_2 = (\Delta^*, \Omega, \Psi, \Pi)\) is a soft directed hypergraph of \(\Delta^*\) since all the conditions for a soft directed hypergraph are satisfied. ◻
Proof. By Theorems 4.3 and 6.3, we have \(\Delta_1\cup_E \Delta_2\) and \(\Delta_1\cup_R \Delta_2\) are soft directed hypergraphs of \(\Delta^*\). Assume that \(\Delta_1\cup_E \Delta_2 = \Delta_{EU} = (\Delta^*, \Omega_{EU}, \Psi_{EU}, \Pi_{EU})\) and \(\Delta_1\cup_R \Delta_2 = \Delta_{RU} = (\Delta^*, \Omega_{RU}, \Psi_{RU}, \Pi_{RU})\). By the definitions of extended union and restricted union of two soft directed hypergraphs, the parameter set \(\Pi_{EU}\) of \(\Delta_{EU}\) is \(\Pi_1\cup \Pi_2\) and the parameter set \(\Pi_{RU}\) of \(\Delta_{RU}\) is \(\Pi_1\cap \Pi_2\). Clearly we have \(\Pi_{RU}\subseteq \Pi_{EU}\) since \(\Pi_1\cap \Pi_2 \subseteq \Pi_1\cup \Pi_2\). If \(\pi \in \Pi_{RU} = \Pi_1 \cap \Pi_2\), \(Z_{RU}(\pi) = (\Omega_{RU}(\pi), \Psi_{RU}(\pi))\), where \(\Omega_{RU}(\pi) = \Omega_1(\pi) \cup \Omega_2(\pi)\) and \(\Psi_{RU}(\pi) = \{(T(e)\cap \Omega_{RU}(\pi),H(e)\cap \Omega_{RU}(\pi))|e\in \Xi\)and\(T(e)\cap \Omega_{RU}(\pi)\neq \phi\)and\(H(e)\cap \Omega_{RU}(\pi)\neq \phi\}\) and \(Z_{EU}(\pi) = (\Omega_{EU}(\pi), \Psi_{EU}(\pi))\), where \(\Omega_{EU}(\pi) = \Omega_1(\pi) \cup \Omega_2(\pi)\) and \(\Psi_{EU}(\pi) = \{(T(e)\cap \Omega_{EU}(\pi),H(e)\cap \Omega_{EU}(\pi))|e\in \Xi\)and\(T(e)\cap \Omega_{EU}(\pi)\neq \phi\)and\(H(e)\cap \Omega_{EU}(\pi)\neq \phi\}\). Clearly \(Z_{RU}(\pi)\) is a weak induced subhypergraph of \(Z_{EU}(\pi) , \forall \pi \in \Pi_{RU} = \Pi_1 \cap \Pi_2\), since both dh-parts are identical. That is, we have
\(\Pi_{RU} \subseteq \Pi_{EU}\),
For all \(\pi \in \Pi_{RU}\), \(Z_{RU}(\pi)=(\Omega_{RU}(\pi),\Psi_{RU}(\pi))\) is a weak induced subhypergraph of \(Z_{EU}(\pi)=(\Omega_{EU}(\pi),\Psi_{EU}(\pi))\).
Hence \(\Delta_1\cup_R \Delta_2\) is a soft weak induced subhypergraph of \(\Delta_1\cup_E \Delta_2\). ◻
Proof. The restricted intersection \(\Delta_1\cap_R \Delta_2\) is defined as \(\Delta_1\cap_R \Delta_2 = \Delta = (\Delta^*,\Omega, \Psi, \Pi)\), where \(\Pi = \Pi_1\cap \Pi_2 \neq \phi\) is the parameter set and for all \(\pi \in \Pi\), \(\Omega(\pi) = \Omega_1(\pi)\cap \Omega_2(\pi)\) and \(\Psi(\pi) = \{(T(e)\cap \Omega(\pi),H(e)\cap \Omega(\pi))|e\in \Xi\)and\(T(e)\cap \Omega(\pi)\neq \phi\)and\(H(e)\cap \Omega(\pi)\neq \phi\}\). Here \(\Omega\) is a mapping from \(\Pi\) to \(\mathcal{P}(\Gamma)\) and \(\Psi\) is a mapping from \(\Pi\) to \(\mathcal{P}(\Xi_s)\). Also \((\Omega, \Pi)\) is a soft set over \(\Gamma\) and \((\Psi, \Pi)\) is a soft set over \(\Xi_s\). When \(\pi \in \Pi = \Pi_1\cap \Pi_2\) , the corresponding dh-part of \(\Delta_1\cap_R \Delta_2\) is \(Z(\pi) = (\Omega(\pi), B(\pi))\) where \(\Omega(\pi) = \Omega_1(\pi)\cap \Omega_2(\pi)\) and \(\Psi(\pi) = \{(T(e)\cap \Omega(\pi),H(e)\cap \Omega(\pi))|e\in \Xi\)and\(T(e)\cap \Omega(\pi)\neq \phi\)and\(H(e)\cap \Omega(\pi)\neq \phi\}\). We have \(\Omega_1(\pi)\cap \Omega_2(\pi)\subseteq \Gamma\) and each hyperarc in \(\Psi(\pi)\) is a subhyperarc of \(\Delta^*\) for all \(\pi \in \Pi = \Pi_1\cap \Pi_2\). So \(Z(\pi) = (\Omega(\pi), \Psi(\pi))\) is a weak induced subhypergraph of \(\Delta^*\) for all \(\pi \in \Pi = \Pi_1\cap \Pi_2\). That is, \(\Delta_1\cap_R \Delta_2 = (\Delta^*, \Omega, \Psi, \Pi)\) is a soft directed hypergraph of \(\Delta^*\) since all the conditions for a soft directed hypergraph are satisfied. ◻
Proof. By Theorems 5.3 and 7.3, we have \(\Delta_1\cap_E \Delta_2\) and \(\Delta_1\cap_R \Delta_2\) are soft directed hypergraphs of \(\Delta^*\). Assume that \(\Delta_1\cap_E \Delta_2 = \Delta_{EI} = (\Delta^*, \Omega_{EI}, \Psi_{EI}, \Pi_{EI})\) and \(\Delta_1\cap_R \Delta_2 = \Delta_{RI} = (\Delta^*, \Omega_{RI}, \Psi_{RI}, \Pi_{RI})\). By the definitions of extended intersection and restricted intersection of two soft directed hypergraphs, the parameter set \(\Pi_{EI}\) of \(\Delta_{EI}\) is \(\Pi_1\cup \Pi_2\) and the parameter set \(\Pi_{RI}\) of \(\Delta_{RI}\) is \(\Pi_1\cap \Pi_2\). Clearly we have \(\Pi_{RI}\subseteq \Pi_{EI}\) since \(\Pi_1\cap \Pi_2 \subseteq \Pi_1\cup \Pi_2\). If \(\pi \in \Pi_{RI} = \Pi_1 \cap \Pi_2\), \(Z_{RI}(\pi) = (\Omega_{RI}(\pi), \Psi_{RI}(\pi))\), where \(\Omega_{RI}(\pi) = \Omega_1(\pi) \cap \Omega_2(\pi)\) and \(\Psi_{RI}(\pi) = \{(T(e)\cap \Omega_{RI}(\pi),H(e)\cap \Omega_{RI}(\pi))|e\in \Xi\)and\(T(e)\cap \Omega_{RI}(\pi)\neq \phi\)and\(H(e)\cap \Omega_{RI}(\pi)\neq \phi\}\) and \(Z_{EI}(\pi) = (\Omega_{EI}(\pi), \Psi_{EI}(\pi))\), where \(\Omega_{EI}(\pi) = \Omega_1(\pi) \cap \Omega_2(\pi)\) and \(\Psi_{EI}(\pi) = \{(T(e)\cap \Omega_{EI}(\pi),H(e)\cap \Omega_{EI}(\pi))|e\in \Xi\)and\(T(e)\cap \Omega_{EI}(\pi)\neq \phi\)and\(H(e)\cap \Omega_{EI}(\pi)\neq \phi\}\). Clearly \(Z_{RI}(\pi)\) is a weak induced subhypergraph of \(Z_{EI}(\pi) , \forall \pi \in \Pi_{RI} = \Pi_1 \cap \Pi_2\), since both dh-parts are identical. That is, we have
\(\Pi_{RI} \subseteq \Pi_{EI}\),
For all \(\pi \in \Pi_{RI}\), \(Z_{RI}(\pi)=(\Omega_{RI}(\pi),\Omega_{RI}(\pi))\) is a weak induced subhypergraph of \(Z_{EI}(\pi)=(\Omega_{EI}(\pi),\Psi_{EI}(\pi))\).
Hence \(\Delta_1\cap_R \Delta_2\) is a soft weak induced subhypergraph of \(\Delta_1\cap_E \Delta_2\). ◻
Proof. By Theorems 4.3 and 7.3, we have \(\Delta_1\cup_E \Delta_2\) and \(\Delta_1\cap_R \Delta_2\) are soft directed hypergraphs of \(\Delta^*\). Assume that \(\Delta_1\cup_E \Delta_2 = \Delta_{EU} = (\Delta^*, \Omega_{EU}, \Psi_{EU}, \Pi_{EU})\) and \(\Delta_1\cap_R \Delta_2 = \Delta_{RI} = (\Delta^*, \Omega_{RI}, \Psi_{RI}, \Pi_{RI})\). By the definitions of extended union and restricted intersection of two soft directed hypergraphs, the parameter set \(\Pi_{EU}\) of \(\Delta_{EU}\) is \(\Pi_1\cup \Pi_2\) and the parameter set \(\Pi_{RI}\) of \(\Delta_{RI}\) is \(\Pi_1\cap \Pi_2\). Clearly we have \(\Pi_{RI}\subseteq \Pi_{EU}\) since \(\Pi_1\cap \Pi_2 \subseteq \Pi_1\cup \Pi_2\). If \(\pi \in \Pi_{RI} = \Pi_1 \cap \Pi_2\), \(Z_{RI}(\pi) = (\Omega_{RI}(\pi), \Psi_{RI}(\pi))\), where \(\Omega_{RI}(\pi) = \Omega_1(\pi) \cap \Omega_2(\pi)\) and \(\Psi_{RI}(\pi) = \{(T(e)\cap \Omega_{RI}(\pi),H(e)\cap \Omega_{RI}(\pi))|e\in \Xi\)and\(T(e)\cap \Omega_{RI}(\pi)\neq \phi\)and\(H(e)\cap \Omega_{RI}(\pi)\neq \phi\}\) and \(Z_{EU}(\pi) = (\Omega_{EU}(\pi), \Psi_{EU}(\pi))\), where \(\Omega_{EU}(\pi) = \Omega_1(\pi) \cup \Omega_2(\pi)\) and \(\Psi_{EU}(\pi) = \{(T(e)\cap \Omega_{EU}(\pi),H(e)\cap \Omega_{EU}(\pi))|e\in \Xi\)and\(T(e)\cap \Omega_{EU}(\pi)\neq \phi\)and\(H(e)\cap \Omega_{EU}(\pi)\neq \phi\}\). Clearly \(Z_{RI}(\pi)\) is a weak induced subhypergraph of \(Z_{EU}(\pi) , \forall \pi \in \Pi_{RI} = \Pi_1 \cap \Pi_2\). That is, we have
\(\Pi_{RI} \subseteq \Pi_{EU}\),
For all \(\pi \in \Pi_{RI}\), \(Z_{RI}(\pi)=(\Omega_{RI}(\pi),\Psi_{RI}(\pi))\) is a weak induced subhypergraph of \(Z_{EU}(\pi)=(\Omega_{EU}(\pi),\Psi_{EU}(\pi))\).
Hence \(\Delta_1\cap_R \Delta_2\) is a soft weak induced subhypergraph of \(\Delta_1\cup_E \Delta_2\). ◻
The introduction of soft directed hypergraphs stemmed from incorporating soft set principles into directed hypergraphs. Through parameterization, soft directed hypergraphs generate a sequence of descriptions for intricate relations depicted by directed hypergraphs. Undoubtedly, the incorporation of parameterization tools renders soft directed hypergraphs a pivotal component in the realm of directed hypergraph theory.