
China is vast and rich in resources, especially with a 10,000-kilometer-long coastline, and it was once predicted that the century would be the century of the ocean. With the development of science and technology, the global demand for energy is increasing, people are no longer satisfied with just mining energy on their own land, they will look to the ocean [15,3,16]. Human beings will rely more on marine resources, get more food, energy, minerals from the ocean, and explore the mysteries of the earth through the study of the ocean. At the same time, the ocean is also an important arena for international political, economic and military struggles, countries are vigorously developing marine resources, but also in the development of their own naval military force, this is because if there is not a sufficiently deterrent to the opponents of the naval force, we can not protect our undersea resources, can not consolidate our sea defense [8,2,12].
According to the needs of the development of the current international situation, China has also correspondingly increased investment in naval construction, especially increased investment in the research and development of high-tech equipment. With the natural camouflage of seawater, the development of underwater weapons has been the focus of attention [13,5,22]. With the rapid development of underwater weaponry, it is very necessary to introduce a set of effective underwater positioning system to complement the experiment [4].
Hydroacoustic positioning system is an instrumentation system that utilizes the time or phase difference between underwater acoustic pulses propagating along different distance paths to locate targets on the surface and in the water [6,18]. Hydroacoustic positioning system according to the length of the positioning baseline can be divided into three types long baseline positioning system help, short baseline positioning system, ultra-short baseline positioning system [14,21].
Hydroacoustic beacons typically send pulsed signals at a frequency of 37.5 kHz, which can transmit acoustic signals from thousands of meters of water [23]. Once a hydroacoustic beacon is operational, it will send a pulsed signal once per second and continue for about a month, and this pulsed signal can be detected by sonobuoys and acoustic locators [10,20]. Automatic identification of hydroacoustic signal is an important field in the research of underwater target identification technology, and it is also an outstanding problem in the field of hydroacoustic signal processing [19]. The early hydroacoustic signal processing method used abroad is blind source separation, and the main hydroacoustic signal processing methods used in China at present are Fourier transform (short-time Fourier transform, fractional-order Fourier transform), wavelet transform, Hilbert’s yellow transform, and error superposition algorithm, etc [7,11]. The current hydroacoustic signal processing methods have more mature applications in the field of hydroacoustic signal processing [1]. However, for the detection and identification of hydroacoustic beacon signals in the sea, these commonly used methods are easily affected by the propagation loss in the water and the background noise of the marine environment, which makes it difficult to realize the effective detection and identification of acoustic beacon signals in the long-distance range [9,17].
Underwater acoustic beacons play an important role in underwater reception, navigation and identification systems. Moreover, its performance has a huge impact on the positioning accuracy and the position distance estimation of the target. The underwater acoustic positioning system can set sonar markers on the measured target, and accurately align with the tracking target on the signal processing of the known sonar markers to achieve positioning and tracking. Therefore, the accuracy of the sonar positioning system depends on the detection technology of the sonar signal. The innovation of the research in this paper lies in the application of machine learning to optimize the beacon signal recognition of the underwater acoustic positioning system, which significantly enhances the positioning accuracy and efficiency. Experimental comparison confirms that this method far exceeds traditional technologies in recognition speed and accuracy, highlights the importance of machine learning in underwater navigation recognition, and contributes a new strategy to the progress of sonar positioning technology.
The underwater acoustic active and passive positioning measurement system is a long-baseline positioning system, and its array distance is generally more than 2 kilometers. Its main purpose is to detect and measure underwater acoustic beacon signals. After the experiment, the target location of the rescue operation is determined. The underwater acoustic positioning system can be divided into active and passive working modes. The most convenient is the passive working mode, because no target combination is required, and the underwater target does not require any additional test equipment. In contrast, the active mode of operation is cumbersome, requiring the addition of voice symbols or hardware platforms to the target for signaling compatibility.
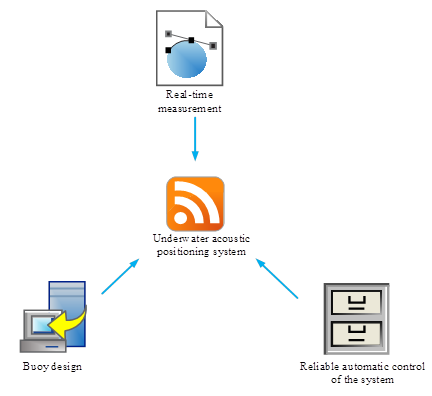
Currently widely used underwater active and passive positioning systems have three functions. The first is to track underwater targets in real-time, show three-dimensional trajectories and save data. The second is a buoy with strong environmental adaptability, corrosion resistance and low power consumption to ensure stable operation. The third is that the system is self-controlled, reliable and portable, supports multiple power supplies, and adapts to unattended operations, as shown in Figure 1. First, it can quickly measure the position of the underwater target in real-time and display the three-dimensional motion path, and can save and revisit the original data of the underwater target. Second, the buoy is designed to meet the power requirements of low-power batteries. The quality and arrangement of buoys can meet the requirements of offshore operations, and meet the operating conditions of high temperature resistance, humidity resistance, low salinity resistance and seawater corrosion resistance, so as to achieve accurate positioning. Third, the system has self-control ability, high reliability, and is easy to carry. The embedded processing system has multiple fixed power sources.
The passive method is to receive the radiated noise of the underwater target through the buoy array, process the signal and calculate the trajectory of the underwater target. In passive mode, the navigation path is measured through the azimuth single intersection of the vector sensor assembly, and the multi-dimensional positioning technology measures the target depth. In the post-processing process, hyperbolic cross-positioning and Doppler compensation methods are used, combined with different positioning algorithms, to obtain high-precision trajectory data. In active mode, sound markers are added to the underwater target, and the buoy matrix is used to receive the pulsed signal of the underwater acoustic signal by transmitting the pulsed signal during the movement of the underwater target through the underwater acoustic signal. The time when the underwater acoustic signal arrives at the buoy can be measured in real-time to obtain the time difference between the signal and the buoy. The embedded computer can use this time interval to solve the trajectory of the underwater target in real-time through the hyperbolic convergence method. The asynchronous positioning method can be used to accurately measure and locate the trajectory of the aircraft. In active mode, a marker is sent to an underwater target; the arrival time of the acoustic signal is recorded; the time difference is calculated. The computer uses time difference information and the principle of hyperbolic intersection to calculate the target position in real-time to ensure accurate tracking. Through the Doppler effect and positioning algorithm, the positioning accuracy and stability are improved.
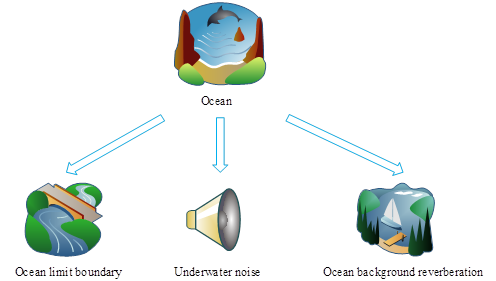
The influence of the marine environment on sound propagation mainly includes three aspects, as shown in Figure 2. The first sea surface and ocean are the extreme boundaries of underwater sound propagation. The actual sea surface is a rough and uneven surface due to waves and other phenomena. Backscattering and reverberation caused by the inhomogeneity of the sea surface are important factors of ocean noise. The ocean floor is another lower boundary of the underwater acoustic channel. Underwater structures are very complex and affect the absorption and dispersion of acoustic reflections. Second, in the marine environment, the reverberation as the underwater acoustic background is the signal scattering caused by the inhomogeneity of various marine diffusers and their boundaries collected at the receiving point. Third, underwater noise mainly includes target radiation noise, ocean natural noise and radiation noise of the receiver itself, which is generally considered to be the interference of Gaussian noise or white noise. The positioning system must capture some characteristic values of the emission target noise for data acquisition and position positioning.
Signal search and detection can be divided into two steps: retrieving relevant features to extract statistics, and then identifying from the visible statistics, as shown in Figure 3. Time-frequency analysis focuses on the first step to improve the characteristics of the original signal, while machine learning adds variation in the second step. In time-frequency analysis, the signal is discovered by changing, modulating, and scaling the principal functions in time and frequency. Machine learning involves creating models and learning from historical data, making predictions and analysis of data by finding it. Therefore, bandpass filters can be used directly in signal processing to filter frequencies other than the target frequency point, thereby avoiding interference from ambient noise (including noise from the receiving platform) and frequency characteristics during signal extraction.

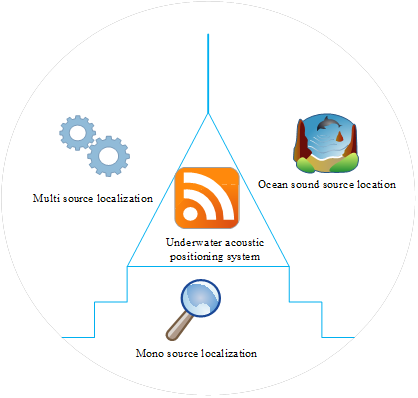
At present, there are three main problems in the signal recognition of underwater acoustic positioning system, as shown in Figure 4.
Machine localization algorithms are divided into learning and prediction phases. During the training phase, the raw sound pressure data is used for preprocessing when entering the mechanical training model. The size of the data used in training depends on or is related to the location of the sound source. For return machines, the distance or depth of the sound source should be displayed continuously. For classifiers, the distance or depth of the sound source is usually encoded by a potential vector. If the corresponding model brand and output match, the unknown parameters of the model are determined using a specific preparation loss function, and the model is trained. Machine learning models are used to predict data from unknown preparation stages. The introduction of machine learning models in the prediction phase is the result of the same preprocessing of the measurement data.
In a machine learning underwater acoustic positioning system, the time, frequency, and intensity characteristics of the signal are first extracted; machine learning models such as support vector machines or neural networks are used to classify and identify the features to distinguish different acoustic beacon signals; signal recognition and sensor data are combined to achieve precise positioning and tracking of underwater targets, and the positioning accuracy and response speed are improved. There are three differences between the underwater acoustic positioning system under machine learning and the traditional positioning system. First, the implementation strategy of an algorithm differs from its efficiency. Machine learning can be viewed as an autonomous learning and network prediction strategy. During the model preparation phase, intensive computation is performed centrally. The models created at this stage are measurably computed during the prediction stage, which facilitates real-time processing of the data. In contrast, traditional methods are based on network matching strategies in a single parameter space. If the parameter space is large, the computational efficiency would be greatly reduced and real-time processing cannot be performed. Second, the cost function used for localization is different. Machine learning methods are based on regression or ranking problems. Learning a cost function is primarily used to minimize mean squared error or entropy. Humans use the appropriate method when dealing with match fields. The third is strong data processing ability. Machine learning techniques can combine large datasets with deep learning models. As long as there is more data, the closer it is statistically to the actual data distribution, both simulated and actual data can be used as training data. However, traditional processing methods cannot efficiently process large amounts of data. The reason is that traditional methods often rely on manual feature engineering. When faced with high-dimensional data, manual design of effective features becomes extremely difficult and time-consuming; at the same time, they lack automatic feature learning capabilities like deep learning, and cannot automatically extract advanced features through multi-layer abstraction, so the efficiency and effectiveness of processing large-scale data sets are limited.
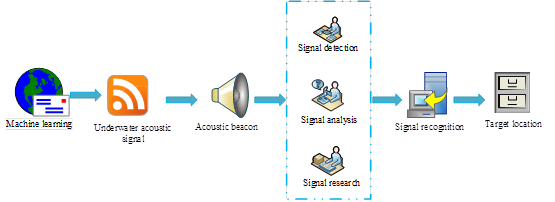
Supported by machine learning algorithms, buoy technology is used for real-time measurements, and the clocks of different buoys are synchronized to establish an accurate underwater positioning system. The passive measurement method is to measure the noise of the target motor and calculate the trajectory of each buoy. The active measurement method is a wireless signal pulse signal with a transit time. The system completes the location of the underwater target by measuring the arrival time of the signal. The acoustic beacon is mainly composed of a signal source board, a power amplifier driver board, a converter matching circuit, a power control panel, an energy storage capacitor and a battery. The working process of the acoustic beacon signal is the main power supply before the signal is transmitted from the underwater target, and it is realized by a low-power single-chip microcomputer. However, the power amplifier is driven by the driver, and after the underwater target is activated, the acoustic beacon signal does not work immediately, and the transmitter waits for the signal to be sent. If the ignition delay sends a sound wave, the trigger signal is displayed. When the signal is working, the display detects the transmission status of the input and transmits pulses. After a few minutes, the signal searches for transmission status. The transmission interval is extended and the transmission frequency is reduced. The radio signal is activated when the final target is recovered, as shown in Figure 5.
In order to analyze the acoustic beacon identification method of the underwater acoustic active and passive positioning system, this paper analyzes and researches it through the support vector machine algorithm. SVM (Support vector machines) are excellent machine learning methods that can efficiently process high-dimensional and noisy sound signals and adapt to linear and nonlinear data. The SVM model is easy to understand and helps to analyze the relationship between sound characteristics and categories. First, the classifier of the acoustic beacon is obtained by introducing slack variables, where the classification model is:
\[\label{GrindEQ__1_} z_{n} =\alpha ^{T} x_{n} +\beta . \tag{1}\]
The distance from \(x_{n}\) to the projection is: \[\label{GrindEQ__2_} x_{n} =x_{0} +d\frac{\alpha }{\left\| \alpha \right\| ^{2} } . \tag{2}\]
Then by transforming, it can be obtained: \[\label{GrindEQ__3_} d\left(x_{n} \right)=y_{n} \frac{\alpha ^{T} x_{n} +\beta }{\left\| \alpha \right\| ^{2} } . \tag{3}\]
Then Formula (3) is converted to maximize the interval, and it can be obtained: \[\label{GrindEQ__4_} y_{n} \frac{\alpha ^{T} x_{n} +\beta }{\left\| \alpha \right\| ^{2} } \ge d_{\max } ,n=1,2,\cdots ,N . \tag{4}\]
It can be converted to: \[\label{GrindEQ__5_} d_{\min } \frac{1}{2} \left\| \alpha \right\| ^{2} \le 1\le y_{n} \left(\alpha ^{T} x_{n} +\beta \right) . \tag{5}\]
Then according to the classification of acoustic beacons, the categories with errors can be found, and the optimization problem of acoustic beacons at this time is: \[\label{GrindEQ__6_} d_{\min } \frac{1}{2} \left\| \alpha \right\| ^{2} +C\sum _{n=1}^{N}\varepsilon _{n} \le 1-\varepsilon _{n} \le y_{n} \left(\alpha ^{T} x_{n} +\beta \right) . \tag{6}\]
C is greater than 0 and is the optimal weight of the acoustic beacon. Then, continuing the error analysis of the minimum classification of acoustic beacons can be obtained: \[\label{GrindEQ__7_} A_{\delta } \left(y_{n} -x_{n} \right)=\left|y_{n} -x_{n} \right|-\delta . \tag{7}\]
Then, regression analysis can be performed on the branches of the acoustic beacon to obtain: \[\label{GrindEQ__8_} m_{n} =\frac{1}{n} \sum _{n=1}^{N}A{}_{\delta } \left(y_{n} -x_{n} \right) , \tag{8}\] \[\label{GrindEQ__9_} R\left(x_{n} \right)=\sum _{n=1}^{N}\left(m_{n} -y_{n} \right) ^{2} . \tag{9}\]
Formulas (8) and (9) are combined to analyze, and it ban be obtained: \[\label{GrindEQ__10_} a_{i} =\sum _{j=1}^{n}\alpha _{ij} x_{j} +\alpha _{i0} ,i=1,2,\cdots ,m \tag{10}\]
Then, the mutual entropy transformation of the training cost can be performed to obtain: \[\label{GrindEQ__11_} T_{n} \left(m_{n} ,A\left(x_{n} ,y_{n} \right)\right)=-\sum _{n=1}^{N}m_{n} \ln A_{n} . \tag{11}\]
For N samples, the corresponding cross-entropy mean and optimal weight are: \[\label{GrindEQ__12_} T\left(i\right)=-\frac{1}{N} \sum _{i=1}^{N}\sum _{n=1}^{N}m_{n} \ln A_{n} , \tag{12}\] \[\label{GrindEQ__13_} \overline{i}=i_{\min } \left[-\frac{1}{N} \sum _{i=1}^{N}\sum _{n=1}^{N}m_{n} \ln A_{n} \right] . \tag{13}\]
Then the optimized cost error function can be obtained as: \[\label{GrindEQ__14_} T\left(i\right)=\frac{1}{2} \sum _{n=1}^{N}\left|\left(A\left(x_{n} ,y_{n} \right)-m_{n} \right)\right|^{2} . \tag{14}\]
Then the mean square error calculation can be performed on the classified text of the acoustic beacon, and it ban be obtained: \[\label{GrindEQ__15_} Q_{mse} =\frac{1}{n} \sum _{n=1}^{N}\left(y_{n} -x_{n} \right)^{2} , \tag{15}\] \[\label{GrindEQ__16_} Q_{mae} =\frac{1}{n} \sum _{n=1}^{N}\left|y_{n} -x_{n} \right| , \tag{16}\] \[\label{GrindEQ__17_} Q_{mape} =\frac{10}{n} \sum _{n=1}^{N}\left|\frac{y_{n} -x_{n} }{y_{n} } \right| ^{2} . \tag{17}\]
Among them, Formula (15) is the mean error; Formula (16) is the mean absolute error; Formula (17) is the mean percentage error.
In order to further understand the acoustic beacon detection effect of the underwater acoustic positioning system, the machine learning algorithm is used to analyze its performance evaluation. In this paper, two companies are selected to investigate their satisfaction with the underwater acoustic positioning system, each of which has 100 employees, as shown in Table 1.
It can be seen from the table that the two companies are relatively satisfied with the underwater acoustic positioning system, accounting for more than half of the total number of people. In their view, the water color positioning system can not only actively detect the acoustic beacon signal, but also locate by the signal frequency of the acoustic beacon, which is very beneficial to the detection and positioning of underwater targets. However, for those who are not satisfied, they feel that the underwater acoustic positioning system under machine learning is not as convenient as the traditional positioning system, and it is not conducive to target detection.
| Satisfied | Commonly | Dissatisfied | |
| Enterprise A | 75 | 12 | 13 |
| Enterprise B | 81 | 15 | 4 |
| Total | 156 | 27 | 17 |
In order to further understand the use effect of the underwater acoustic positioning system, this paper analyzes and studies the receiving frequency and performance degree of the acoustic beacon signal through the machine learning algorithm, as shown in Figure 6.
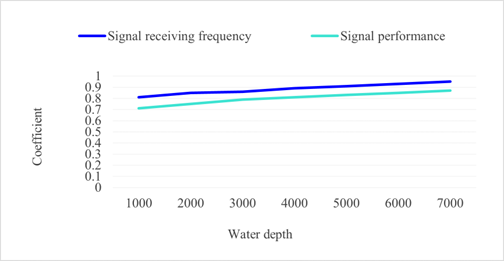
It can be seen from the figure that with the continuous increase of water depth, the signal receiving frequency and performance of the underwater acoustic positioning system are also increasing. This shows that machine learning can more effectively assist underwater acoustic positioning systems in target recognition and detection in the deep sea, and the signal reception frequency of acoustic beacons in the deep sea is still normal. The performance is almost the same as that of the shallow sea, which is very conducive to the normal operation of deep sea target detection. Therefore, machine learning can improve and make up for the shortcomings of the deep sea field.
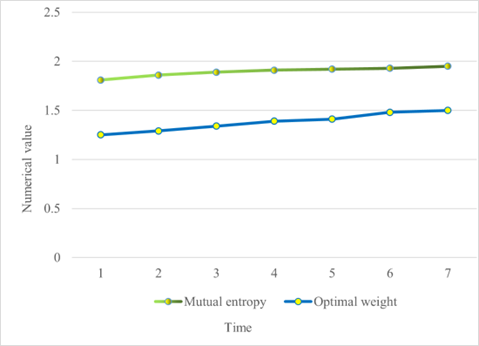
In order to further test the accuracy of the underwater acoustic positioning system, the support vector machine algorithm is used to analyze the mutual entropy value and optimal weight of the acoustic beacon signal identification. The specific results are shown in Figure 7.
As can be seen from the above figure, with the increase of time, the mutual entropy value and optimal weight of the water color positioning system are constantly increasing. The mutual entropy value is about 1.90, and the optimal weight is about 1.38. The continuous improvement of the signal mutual entropy value of the underwater acoustic active and passive positioning system under machine learning shows that machine learning can promote the signal recognition effect of the underwater acoustic active and passive positioning system, so that the deep-sea target signal can be sent out more quickly, which is convenient for signal reception and detection. The continuous growth of the optimal weight indicates that the proportion of machine learning in the active and passive determination of underwater acoustics is constantly increasing.
In order to better understand the acoustic beacon detection effect of the underwater acoustic positioning system, this paper analyzes the recognition speed and detection accuracy of the underwater acoustic positioning system under machine learning and the traditional underwater acoustic positioning system, as shown in Figure 8.
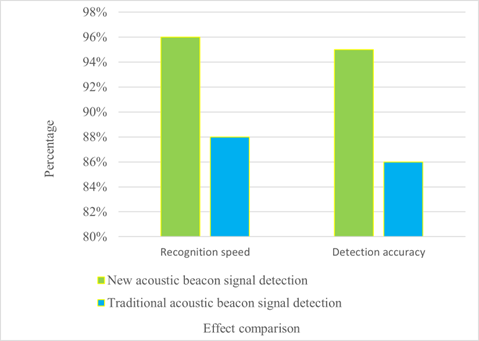
As can be seen from the figure, the recognition speed and detection accuracy of the acoustic beacon signal under machine learning are much higher than the traditional recognition mode, and the recognition speed is about 8% higher, and the detection accuracy is about 9% higher. Because the target detection effect of the underwater acoustic positioning system under machine learning is better, the data processing and analysis of the target can be performed to judge the movement trajectory of the target, thereby promoting the improvement of the recognition speed and detection accuracy. However, the traditional underwater acoustic positioning system can only locate the target in a fuzzy way, and it takes a lot of manpower and material resources to further search, which is not conducive to the identification and detection of the target.
Active and passive underwater positioning systems are external tracking systems used for the trajectory of underwater high-speed targets. The system uses the residual network to capture the signals of high-speed underwater moving targets (passive positioning model) or high-speed underwater moving targets (active positioning model) in real-time, and synchronously collects the data between the residuals through the receiver. This data is then collected through wireless communication with a computer display control panel and measures the target’s trajectory in the water. Then, by adjusting the appropriate converter circuit, the impedance adjustment of the converter is realized, so that the converter can work most effectively. Finally, through the design and debugging of the power amplifier circuit, the power design of the transmitter signal is realized.